






















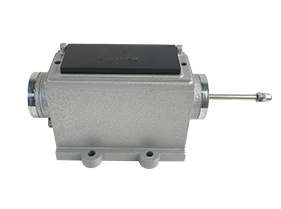


























Photoelectric encoder is a digital detection device integrating light, machine and electricity. It is a kind of sensor that converts the mechanical and geometric displacement to the shaft into pulse or digital quantity through photoelectric conversion. It is mainly used for speed or position (Angle) detection. It has the advantages of high precision, fast response, strong anti-interference ability, stable and reliable performance. According to the structure form can be divided into linear encoder and rotary encoder two types.
Rotary encoder is mainly composed of grating, light source, reader, signal conversion circuit, mechanical transmission and so on. The grating surface is engraved with radiating light gaps with equal pitch, and the two adjacent light gaps represent an incremental period. Photosensitive with two grating surfaces. Since the two grating faces have a 90° phase difference, this output can be entered into a digital addition and subtraction calculator to represent angles in terms of indexing values. Their pitch can be divided by the output signal type of photoelectric encoder, which can be divided into two categories: incremental and absolute value.
Eddy current displacement sensor manufacturers know that the rotary incremental encoder outputs the pulse when it rotates, and knows its position through the counting device. When the encoder does not move or the power goes out, it relies on the internal memory of the counting device to remember the position. In this way, when the power failure, the encoder can not have any movement; When the call is working, the encoder output pulse process, there can be no interference and loss of pulse, otherwise, the counting device memory of the zero will be offset, and the amount of this offset is not known, only after the wrong production results can be known.
Absolute encoder optical code disk has many lines, each line in turn to 2 lines, 4 lines, 8 lines, 16 lines...... It is arranged so that at each position of the encoder, a unique set of binary codes (Gray code) from 2 to the power of zero to 2 to the power of n-1 are obtained by reading the on and off of each notch. This is called a bit absolute encoder. Such an encoder is determined by the mechanical position of the code disk, which is not affected by power outage and interference. The absolute encoder has the uniqueness of each position determined by the mechanical position. It does not need to remember, it does not need to find reference points, and it does not need to count all the time. It reads its position whenever it needs to know its position. In this way, the anti-interference characteristic and data reliability of the encoder are greatly improved. Absolute encoders are more and more widely used in industrial control positioning because of their obvious superiority over incremental encoders in positioning.
The output of encoder signal includes parallel output, serial output, bus output, transformer output and so on. The serial output is the time data in accordance with the convention, has the output; Spatially, all bits of data are sent (successively) on a set of cables. This convention is called "communication protocol", and the physical forms of connection include RS232, RS422(TTL), RS485, etc. The serial output has fewer connection lines and longer transmission distance, so the reliability is greatly improved, but the transmission speed is slower than that of parallel output. For absolute encoders, the parallel output of signals is the simultaneous sending of data in time: in space, each bit of data occupies one cable. For the absolute encoder with low number of bits, it can output the number directly in this form and enter the I/O interface of PLC or upper computer directly. This way output instant, simple connection. However, for absolute encoders with large number of bits, there are many core cables, which brings engineering difficulty and inconvenience, and reduces reliability. Therefore, in absolute encoder multi-digit output generally does not use parallel output type, but choose serial output or bus output.